

Specifications
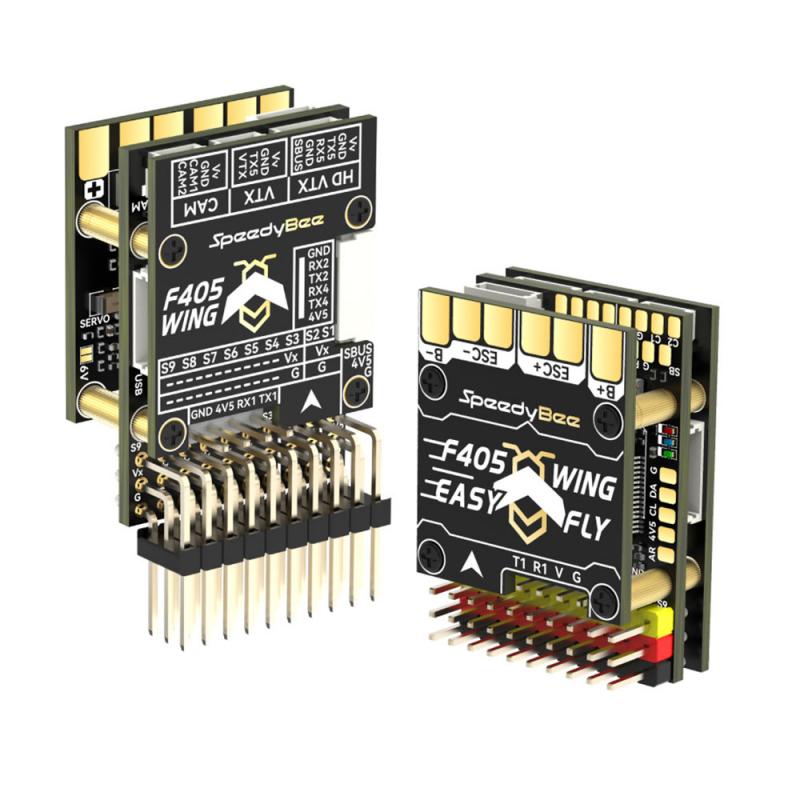
SpeedyBee F405 WING MINI FC board
- MCU: STM32F405, 168MHz, 1MB Flash
- IMU(Gyro&Accelerometer): ICM-42688-P
- Barometer: SPL006-001
- OSD Chip: AT7456E
- Blackbox: MicroSD Card Slot
- UART: 6 sets (USART1, USART2, USART3, UART4, UART5, UART6 - Dedicated for Wireless board Telemetry connection)
- I2C: 1x Used for magnetometer, digital airspeed sensor
- ADC: 4x (VBAT, Current, Analog RSSI, Analog AirSpeed)
- PWM: 12x (9x pin headers + 2x solder pads + 1x "LED" pad)
- ELRS/CRSF Receiver: Supported, connected to UART1
- SBUS: Built-in inverter for SBUS input (UART2-RX)
- LED: 3x LEDs for FC STATUS (Blue, Green) and 3.3V indicator (Red)
- Analog RSSI: Supported, Named as "RS"
- Dual Analog Camera Switching: Default to Camera1 Video Input (C1). Switch between C1 and C2 using ArduPilot Relay or INAV Modes/USER.
- Both cameras should have the same video format, either PAL or NTSC.
- Supported FC Firmware: INAV: SpeedyBeeF405WING (default) ArduPilot: SpeedyBeeF405WING
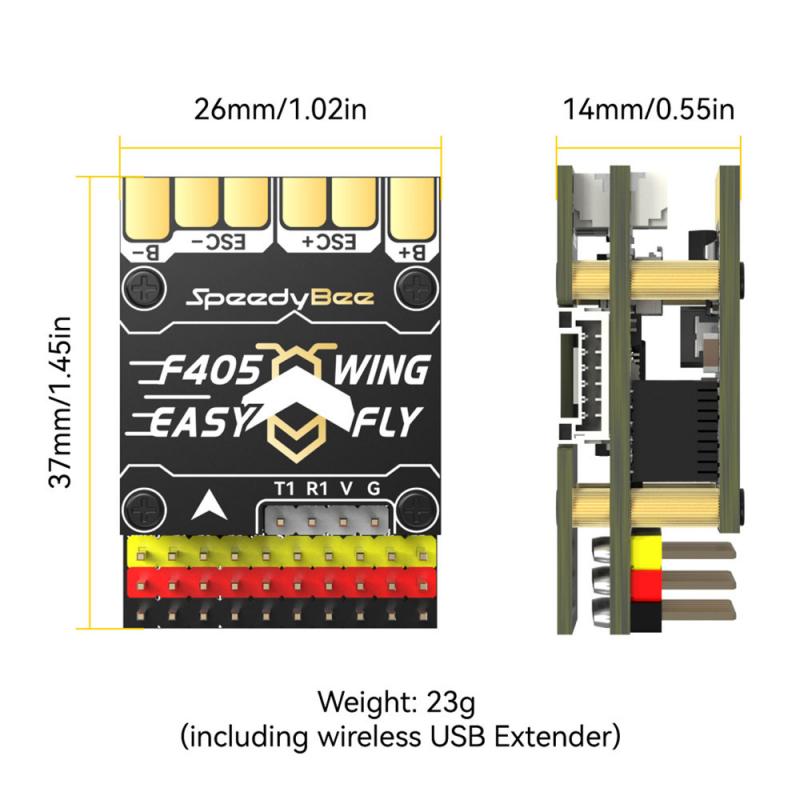
- Weight: 5.6g
SpeedyBee F405 WING MINI PDB board
- Input voltage range: 7~26V (2~6S LiPo)
- Battery Voltage Sensor: Connect to FC board VBAT, 1K:10K (Scale 1100 in INAV, BATT_VOLT_MULT 11.0 in ArduPilot)
- Battery Current Sensor: 80A continuous, 150A peak Connect to FC board Current (Scale 195 in INAV, 50 A/V in ArduPilot)
- TVS Protective diode: Yes
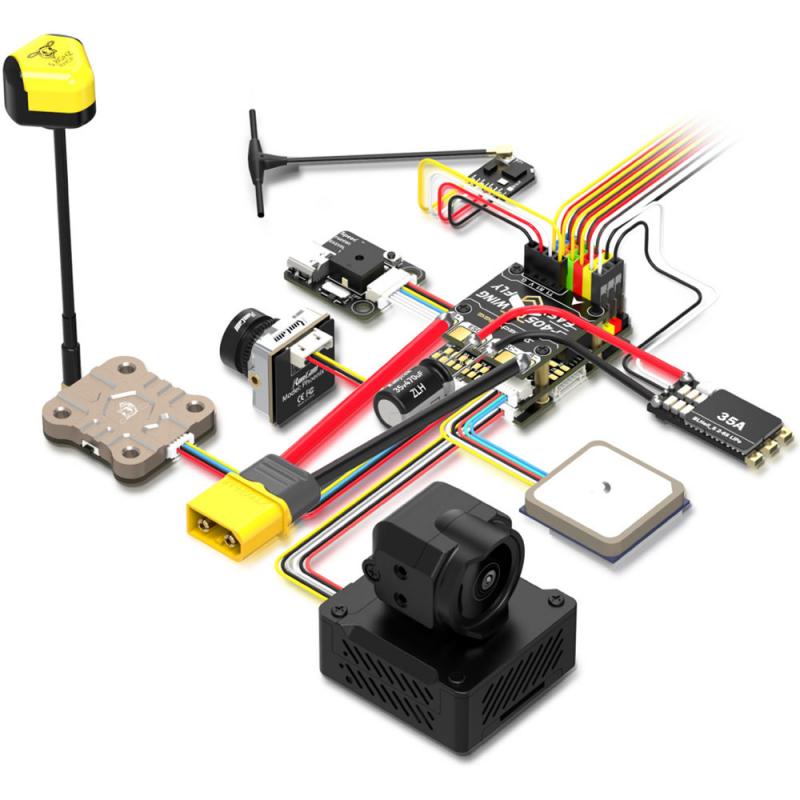
- FC BEC output: Output 5.2V +/- 0.1V DC Continuous current 2 Amps, 3A Peak Designed for FC, Receiver, GPS module, AirSpeed Sensor, Telemetry module
- VTX & Camera power supply: The VTX power interface Vv offers two power supply options: direct battery voltage or integrated BEC 5V (sharing the 5V4A Servo BEC voltage)
- By default, it is set to battery voltage
- (Ensure the VTX and camera input voltage range is compatible)
- Switching to 5V power supply is possible via pad jumper (using Servo BEC output)
- (If using this method, ensure the current requirements for both servo and VTX are sufficient)
- Servo BEC output: Output 5V +/- 0.1V DC Continuous current 4 Amps, 5A Peak Voltage adjustable, 5V Default, 6V via jumper Designed for Servos.
- Weight: 5.5g







